IB Physics Topic 1 Notes
A1: Kinematics & motion
Properties of motion
In Topic A.1, you need to focus on kinematics - the movement of objects, or motion. This is a fundamental concept in physics, and can be described with several terms:
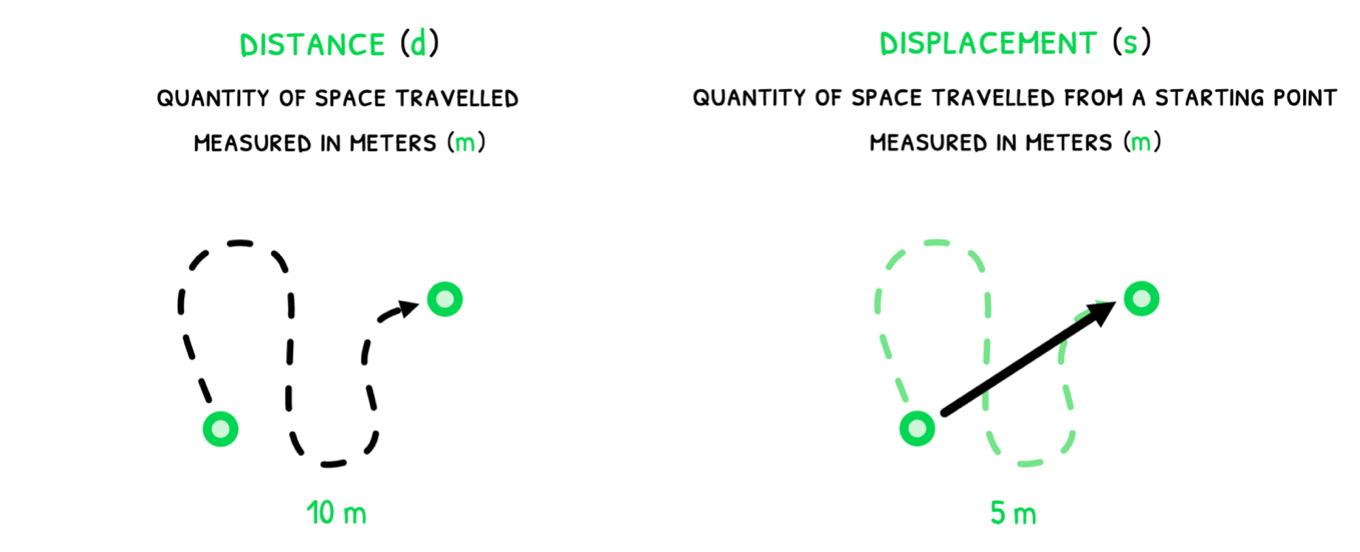
- distance (d) – the amount of space travelled, measured in m.
- displacement (s) – the net distance an object has travelled from its starting point in a direction, measured in m.
- speed (v or u) – the distance travelled per unit time, measured in m s-1. v refers to the final speed and u to the initial speed.
- velocity (v or u) – the displacement per unit time, measured in m s-1. v refers to the final velocity and u to the initial velocity.
- acceleration (a) – the velocity travelled per unit time or displacement travelled per square unit time, measured in m s-2.
The matching equations are:
Remember that displacement, velocity, and acceleration are vectors, whereas speed is a scalar and is directionless.
An object’s measured velocity is also dependent on how it is measured and what it is measured in reference to. In motion experiments, velocity or acceleration are measured via:
- light gates – a gate emits a beam of light and can calculate the average speed of the object based on how long it breaks the beam or how long it takes to travel between two gates.
- strobe photography – light flashes at a set rate in front of a camera, capturing the object’s motion in pictures.
A2: Forces & momentum
Forces
In Topic A.1, the force of gravity and fluid resistance were discussed. In Topic A.2, you need to know more detail about forces and how they impact the motion of objects, including their momentum. Forces are actions that cause the deformation or change in velocity (acceleration) of an object, measured in Newtons (N). Forces act on one object at a time with magnitude and direction and may be exerted by other objects.
The main types of forces encountered are:
- Gravitational (Fg) – the attractive force exerted by an object’s mass on another object, referred to as the affected object’s weight (W).
- Electric (Fe) – the force between two electrically charged objects.
- Magnetic (Fm) – the force between two magnetic objects.
- Normal (FN) – the force a surface perpendicularly exerts on an object due to its weight.
- Friction (Ff) – the force a surface parallelly exerts to counteract another surface’s motion.
- Elastic restoring force (FH) - the force a spring exerts in both directions on another object when it is squished or stretched.
- Tension (T) – the force a rope or cable exerts in both directions on another object when it is stretched.
- Viscous drag force (Fd) - the force opposing the motion of a small sphere through a fluid.
- Buoyancy (Fb) - the force on a body due to its displacement of fluid.
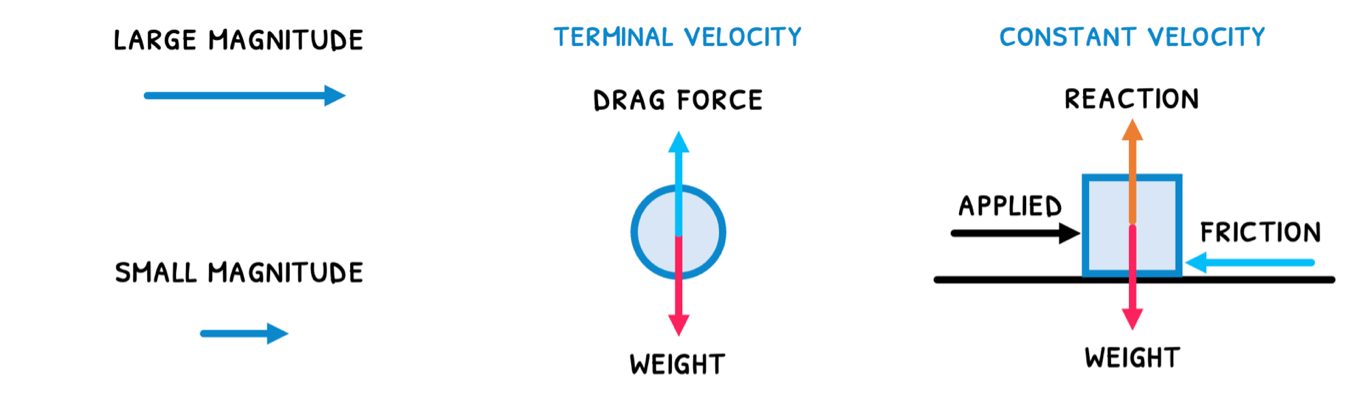
Free body diagrams
Forces are drawn using free body diagrams. These show an object and all the forces acting upon it. An example is shown below:
As stated before, weight (W) is the gravitational force on an object, measured in Newtons. This must be distinguished from mass (m), which is the amount of matter contained in an object, measured in kg. The formula for weight, where g = 9.8 ms-2 is:
Friction
As stated before, friction is a force exerted by a surface to counteract another surface’s motion. If a surface is said to be smooth, there is no friction between that surface and any surface in relative motion. In friction between solids, there are two types:
Static friction – the force exerted to stop another resting surface from moving. This acts up to a maximum Ff, keeping Σ F = 0. The formula for Ff is:
In this, μs is the coefficient of static friction, which relates the reaction force and the maximum static frictional force. If the applied force > Fs, the object begins to move and Fs decreases, becoming Fd.
Dynamic friction – the force exerted on a moving surface, with a similar formula:
Remember that coefficient of dynamic friction μd < μs. It relates the reaction force and the maximum dynamic frictional force, as described to the formula above.
A3: Work, energy sources & power
Work
From Topic A.2, you learned about the different types of forces. It may seem obvious that applying any force requires energy, called work. Work (W) is the measure of the energy required to apply a force to move an object in the direction of the force. As such, the formula for this is:
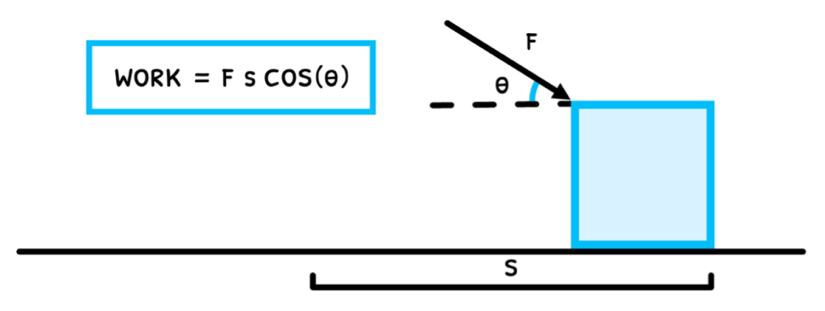
Despite using displacement and force in the formula, work is a scalar quantity. This is because by definition work is only applied in the direction of the force.
As a result, if the object moves at a right angle to the force, no work has been done, as cos (90°) = 0. As with any energy, work is measured in Joules (J).
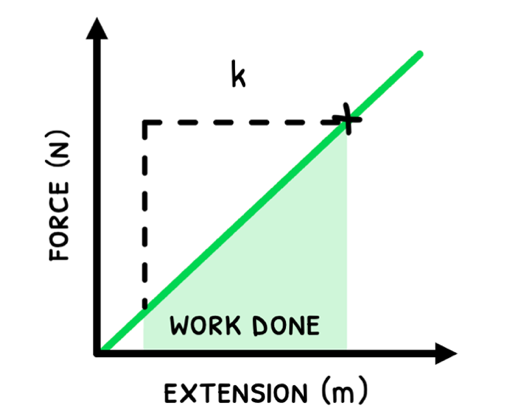
Springs are a special scenario because the work done is not constant. The more a spring is compressed or stretched, the more work is required to compress or stretch it further.
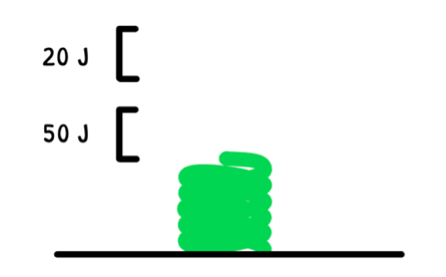
It thus requires a force-distance graph to determine the work, which is the area under the line.
Energy
As mentioned earlier, it takes energy to apply a force. It thus makes that sense that work done is also equal to the amount of energy transferred. Energy (E) is a measure of the amount of work done, measured in joules (J).
Within any physical interaction, the principle of conservation of energy always applies:
- the total energy of any closed system stays the same.
- energy is not created or destroyed, it only changes form.
Most reactions do not have a perfect transfer of energy and will have some transfer into heat and sound.